Pickerbot Plus
Pickerbot Plus is an ideal R&D platform for outdoor robot applications such as agriculture, mining and construction projects.
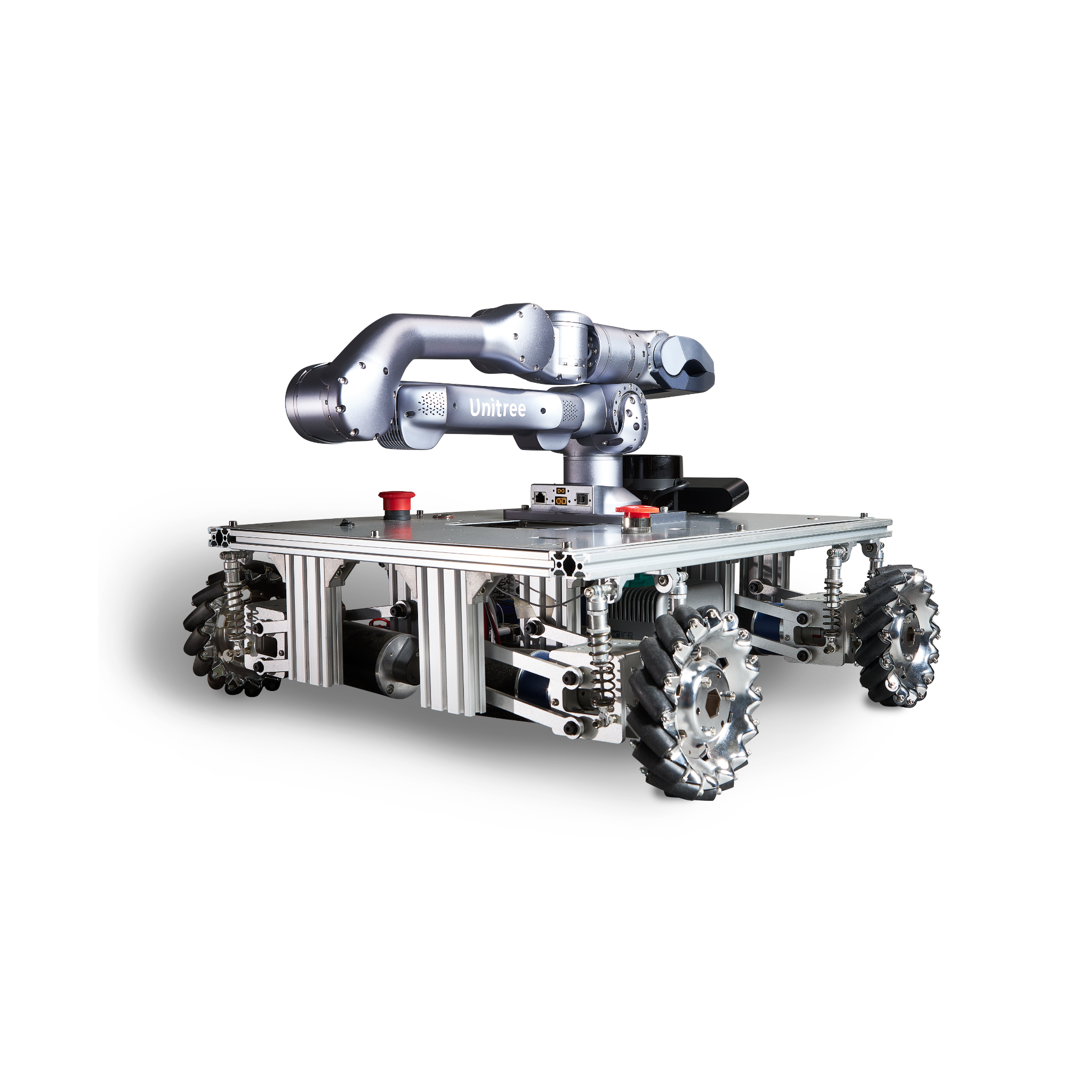
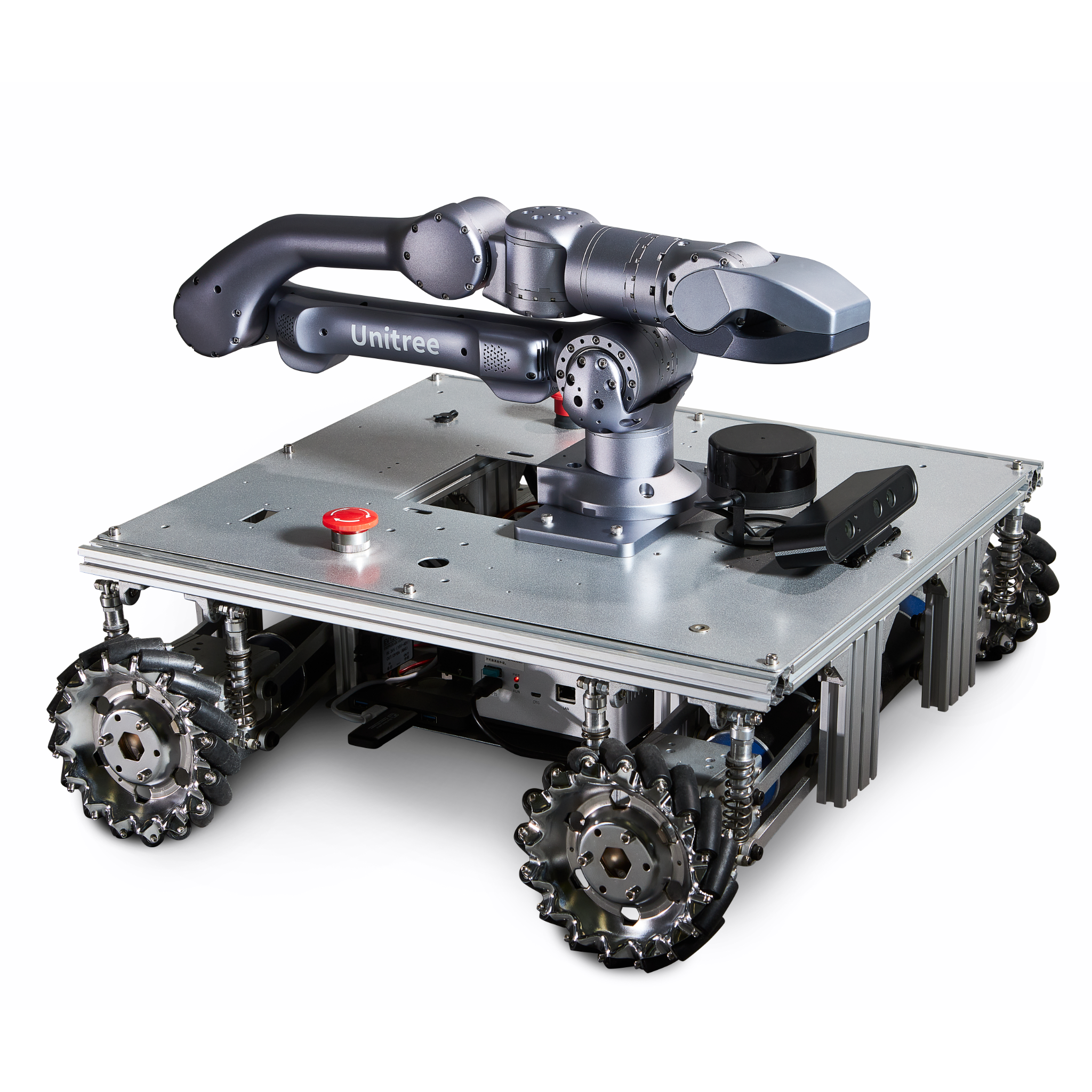
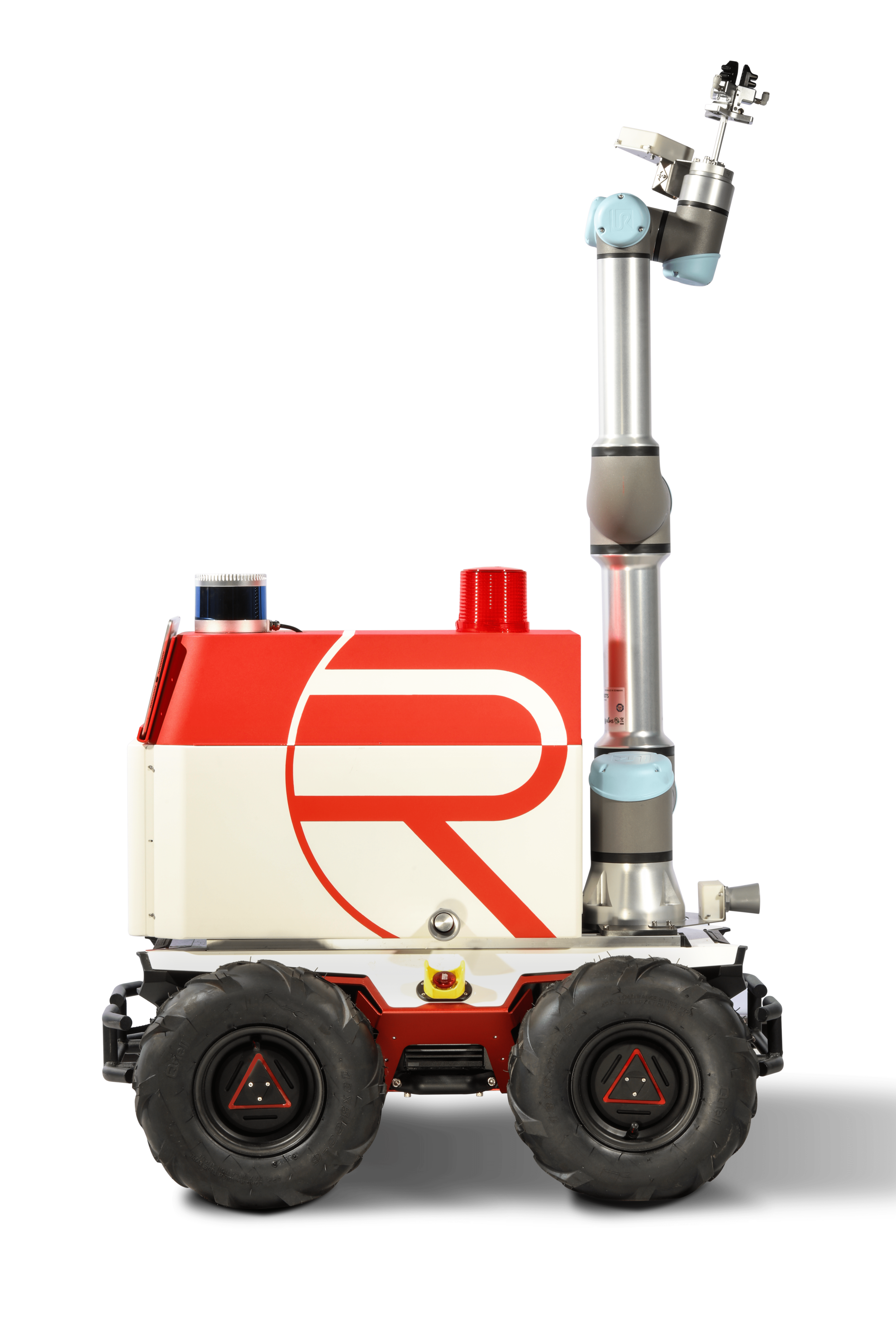
Pickerbot Plus is equipped with UR5e 6-axis robotic arm, 4WD Independent Suspension System, builtin ROS Computer (Jetson Orin Nano or Orin NX), 3D LiDAR and Depth Camera.
Pickerbot Plus is developed based on an R&D project for a tomato picking robot. The successful formula of integrating robotic chassis, arm and gripper with 99% computer vision accuracy is open for all robotic researchers and developers now. Pickerbot Plus saves time and money for rapid prototyping or product development of your own R&D projects. This is a professional field robot platform for outdoor commercial applications in the fields of agriculture, mining and construction industries.
Why ROS?
ROS is the most popular robot operating system in the world. A hardware platform based on ROS will benefit the user gaining extensive practical skills from the world’s most promising robot operating system.
Quick Start
ROS and Ubuntu images are pre-loaded on Pickerbot Plus which include all the essential ROS software packages and drivers. Our online tutorial will guide the user how to launch Pickerbot Plus and its ROS packages within minutes.
Complete Solution
Pickerbot Plus is a complete package for ROS learning and research projects bundled with all essential hardware components and ROS software.
Expandable
Pickerbot Plus is expandable to add accessories such as GPS antenna, voice recognition modules, LCD screen and external keyboards etc..
Software Architecture
Pickerbot Plus is developed based on ROS 1 (Melodic on Ubuntu 18.04). Computer Vision algorithm is based on Yolo 4. Motion Planning Framework for the robotic arm is based on MoveIt. All the key components of Pickerbot Plus are now compatible with ROS 2. You may choose to switch to ROS 2 and develop your own ROS 2 packages.
Specifications
Hardware:
ROS Computer - Jetson Orin Nano or NX
Chassis Dimension - 760x700x960 mm
Chassis Weight - 68 kg
Chassis Camera - Orbbec Astra Depth Camera
Chassis Payload - 50 kg
Independent Suspension - Yes
Wheel Size (Diameter) - 498mm
Driving System - Ackerman Front Steering 4WD
Power Supply - 24v, 30,000 mAh battery, AC 220V charger
Max Speed - 1.5m/s
Battery Life - 2~3.5 hours
Motor - 4x400W Brushless Servo Motor
Encoder - 2500-line Magnetic Incremental Encoder
I/O Interface - CAN, 232 Serial Port
Remote Control - Radio Remote Control
Arm - Universal Robot (UR5e)
Arm Weight - 20.6 kg
Arm Reach - 850 mm
Degree of Freedom - 6
Arm Interface - Ethernet, USB
Arm Payload - 5 kg
Arm Voltage - 100~240v AC (24v DC Converter Included)
Gripper - Electric Gripper
Gripper Camera - Intel Realsense
LiDAR - Leishen 3D C16 LiDAR
Software:
OS - Ubuntu 18.04
ROS 1 - Melodic
Applications
Agriculture robot
Mining robot
Construction robot
Inspection robot
Rescue robot
Service robot
Transport robot
Delivery robot
Pickerbot Plus is an ideal R&D platform for outdoor robot applications such as agriculture, mining and construction projects.
Pickerbot Plus is equipped with UR5e 6-axis robotic arm, 4WD Independent Suspension System, builtin ROS Computer (Jetson Orin Nano or Orin NX), 3D LiDAR and Depth Camera.
Pickerbot Plus is developed based on an R&D project for a tomato picking robot. The successful formula of integrating robotic chassis, arm and gripper with 99% computer vision accuracy is open for all robotic researchers and developers now. Pickerbot Plus saves time and money for rapid prototyping or product development of your own R&D projects. This is a professional field robot platform for outdoor commercial applications in the fields of agriculture, mining and construction industries.
Why ROS?
ROS is the most popular robot operating system in the world. A hardware platform based on ROS will benefit the user gaining extensive practical skills from the world’s most promising robot operating system.
Quick Start
ROS and Ubuntu images are pre-loaded on Pickerbot Plus which include all the essential ROS software packages and drivers. Our online tutorial will guide the user how to launch Pickerbot Plus and its ROS packages within minutes.
Complete Solution
Pickerbot Plus is a complete package for ROS learning and research projects bundled with all essential hardware components and ROS software.
Expandable
Pickerbot Plus is expandable to add accessories such as GPS antenna, voice recognition modules, LCD screen and external keyboards etc..
Software Architecture
Pickerbot Plus is developed based on ROS 1 (Melodic on Ubuntu 18.04). Computer Vision algorithm is based on Yolo 4. Motion Planning Framework for the robotic arm is based on MoveIt. All the key components of Pickerbot Plus are now compatible with ROS 2. You may choose to switch to ROS 2 and develop your own ROS 2 packages.
Specifications
Hardware:
ROS Computer - Jetson Orin Nano or NX
Chassis Dimension - 760x700x960 mm
Chassis Weight - 68 kg
Chassis Camera - Orbbec Astra Depth Camera
Chassis Payload - 50 kg
Independent Suspension - Yes
Wheel Size (Diameter) - 498mm
Driving System - Ackerman Front Steering 4WD
Power Supply - 24v, 30,000 mAh battery, AC 220V charger
Max Speed - 1.5m/s
Battery Life - 2~3.5 hours
Motor - 4x400W Brushless Servo Motor
Encoder - 2500-line Magnetic Incremental Encoder
I/O Interface - CAN, 232 Serial Port
Remote Control - Radio Remote Control
Arm - Universal Robot (UR5e)
Arm Weight - 20.6 kg
Arm Reach - 850 mm
Degree of Freedom - 6
Arm Interface - Ethernet, USB
Arm Payload - 5 kg
Arm Voltage - 100~240v AC (24v DC Converter Included)
Gripper - Electric Gripper
Gripper Camera - Intel Realsense
LiDAR - Leishen 3D C16 LiDAR
Software:
OS - Ubuntu 18.04
ROS 1 - Melodic
Applications
Agriculture robot
Mining robot
Construction robot
Inspection robot
Rescue robot
Service robot
Transport robot
Delivery robot
Pickerbot Plus is an ideal R&D platform for outdoor robot applications such as agriculture, mining and construction projects.
Pickerbot Plus is equipped with UR5e 6-axis robotic arm, 4WD Independent Suspension System, builtin ROS Computer (Jetson Orin Nano or Orin NX), 3D LiDAR and Depth Camera.
Pickerbot Plus is developed based on an R&D project for a tomato picking robot. The successful formula of integrating robotic chassis, arm and gripper with 99% computer vision accuracy is open for all robotic researchers and developers now. Pickerbot Plus saves time and money for rapid prototyping or product development of your own R&D projects. This is a professional field robot platform for outdoor commercial applications in the fields of agriculture, mining and construction industries.
Why ROS?
ROS is the most popular robot operating system in the world. A hardware platform based on ROS will benefit the user gaining extensive practical skills from the world’s most promising robot operating system.
Quick Start
ROS and Ubuntu images are pre-loaded on Pickerbot Plus which include all the essential ROS software packages and drivers. Our online tutorial will guide the user how to launch Pickerbot Plus and its ROS packages within minutes.
Complete Solution
Pickerbot Plus is a complete package for ROS learning and research projects bundled with all essential hardware components and ROS software.
Expandable
Pickerbot Plus is expandable to add accessories such as GPS antenna, voice recognition modules, LCD screen and external keyboards etc..
Software Architecture
Pickerbot Plus is developed based on ROS 1 (Melodic on Ubuntu 18.04). Computer Vision algorithm is based on Yolo 4. Motion Planning Framework for the robotic arm is based on MoveIt. All the key components of Pickerbot Plus are now compatible with ROS 2. You may choose to switch to ROS 2 and develop your own ROS 2 packages.
Specifications
Hardware:
ROS Computer - Jetson Orin Nano or NX
Chassis Dimension - 760x700x960 mm
Chassis Weight - 68 kg
Chassis Camera - Orbbec Astra Depth Camera
Chassis Payload - 50 kg
Independent Suspension - Yes
Wheel Size (Diameter) - 498mm
Driving System - Ackerman Front Steering 4WD
Power Supply - 24v, 30,000 mAh battery, AC 220V charger
Max Speed - 1.5m/s
Battery Life - 2~3.5 hours
Motor - 4x400W Brushless Servo Motor
Encoder - 2500-line Magnetic Incremental Encoder
I/O Interface - CAN, 232 Serial Port
Remote Control - Radio Remote Control
Arm - Universal Robot (UR5e)
Arm Weight - 20.6 kg
Arm Reach - 850 mm
Degree of Freedom - 6
Arm Interface - Ethernet, USB
Arm Payload - 5 kg
Arm Voltage - 100~240v AC (24v DC Converter Included)
Gripper - Electric Gripper
Gripper Camera - Intel Realsense
LiDAR - Leishen 3D C16 LiDAR
Software:
OS - Ubuntu 18.04
ROS 1 - Melodic
Applications
Agriculture robot
Mining robot
Construction robot
Inspection robot
Rescue robot
Service robot
Transport robot
Delivery robot